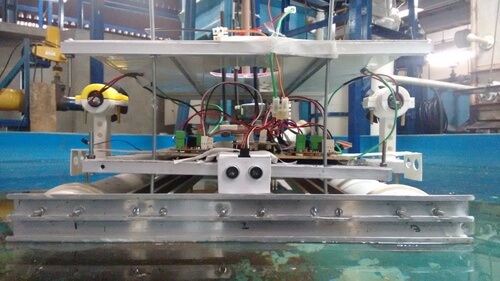
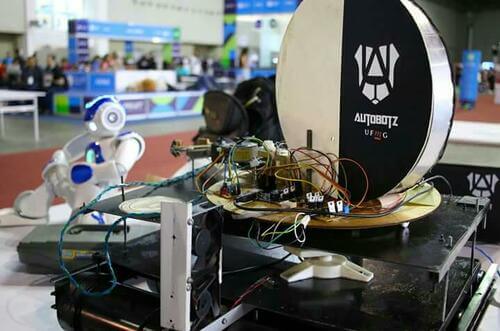
Um veículo autônomo para ambiente aquático que participou da competição IEEE Open. O desafio OPEN de 2015 exigiu a construção de um robô autônomo para
ambientes aquáticos. Sabendo que as aplicações para robôs desse tipo são muito mais abrangentes que o desafio proposto, a equipe decidiu construir um
modelo que também era um veículo genérico para o ambiente aquático. O modelo é baseado em um design de aerobarco e foi escolhido considerando que não
precisa de nenhum tipo de energia extra para o equilíbrio da água, uma vez que a força de flutuação pode fornecê-lo.
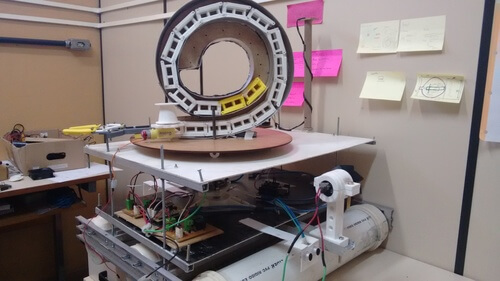
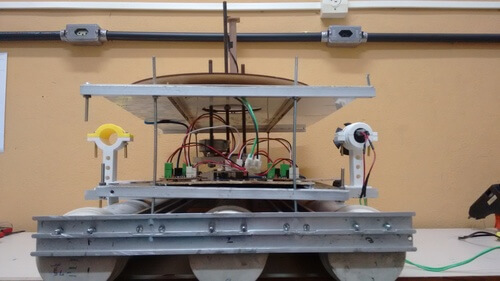
A base de suporte do nosso robô foi construída usando tubos de PVC mantidos juntos por barras de alumínio. Durante sua construção, a equipe teve o
cuidado de tornar os tubos à prova d'água. Construímos os suportes usando uma impressora 3D e o material utilizado foi o polímero ABS. Usamos motores sem
escova e ventiladores de plástico retirados dos coolers do PC para criar nosso sistema de propulsão. Também conseguimos construir as hastes verticais e os
tubos de conexão em aço e o manipulador e manipulador eletrônico 'andares', em fibra de vidro.
O design eletrônico do Autoboat inclui seus microcontroladores, sensores, circuitos de driver, atuadores (motores) e computador incorporado. O último
está conectado a uma câmera e executa todo o software de alto nível do robô, como processamento de imagem e planejamento de caminho. Os comandos
enviados pelo computador são lidos por um dos dois Arduino Unos usados como microcontroladores do robô. Os Arduinos trocam informações usando o
protocolo de comunicação I²C. Os microcontroladores agem interpretando os comandos enviados pelo computador e convertendo-os em sinais elétricos
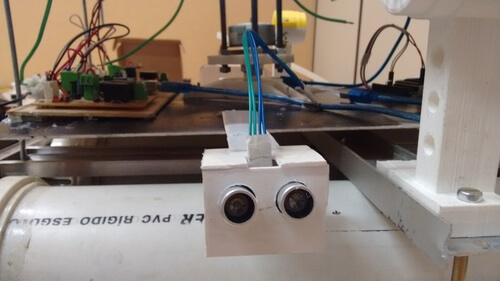
para os circuitos do robô, e também enviando de volta as informações fornecidas pelos sensores para usá-las no software de navegação. Alguns desses
sensores são: quatro sonares usados para medir a distância dos obstáculos, uma unidade de medida inercial (IMU) para medir a orientação do barco no
espaço e um sensor de presença infravermelho na pinça para detectar objetos dentro dela. Os circuitos do driver do motor são comandados pelos Arduinos
e consistem em uma ponte H para acionar o motor DC da garra, dois drivers de motor de passo para o manipulador (um para a rotação e outro para o
movimento de extensão / retração) e dois ESCs (Electronic Controle de velocidade) para acionar os motores CC sem escova dos hélices. Além disso,
O barco é alimentado por uma bateria de 12 V de polímero de lítio (LiPo), conectada a um circuito de monitoramento e proteção. Este circuito, além
de informar o nível de carga restante, também protege a bateria contra danos graves (causados, por exemplo, por sobrecorrente ou desequilíbrio de
carga entre as células). Enquanto parte da eletrônica é alimentada diretamente por essa tensão, parte dela requer 5 V para funcionar. Portanto,
um circuito regulador de tensão é usado para converter os doze volts da bateria em cinco, para serem usados por esses componentes.
O Autoboat precisa deixar sua posição inicial, identificar objetos em uma plataforma, mover-se para a posição deles, agarrá-los e trazê-los de
volta para outra plataforma. Para isso, ele está equipado com uma camara para aquisição de imagens e processamento posterior. Usamos um algoritmo
para identificar os blocos de destino e os blocos indesejados por sua cor e obtemos uma estimativa de distância usando seu tamanho na imagem e
também sensores ultrassônicos, que nos fornecem uma medida mais precisa. Quando temos esses dados, podemos controlar os ângulos dos motores
sem escova para mover o barco em direção à plataforma que queremos, a fim de agarrar os blocos. Quando chegamos lá, estendemos o braço robótico
e fechamos o punho para agarrar o bloco; só retraímos o braço quando sabemos que realmente agarramos um bloco, usando sensores infravermelhos
na extremidade mais distante da nossa garra. Se interrompermos o fluxo óptico contínuo entre os sensores, sabemos que há algo entre as garras
(espero que os blocos que queremos!). Podemos então voltar à plataforma inicial, controlando novamente a direção de nossos motores sem escova.
É isso aí, missão cumprida! Na competição, a missão do robô era deixar sua posição inicial, identificar blocos em uma plataforma flutuante,
avançar para sua posição, agarrá-los e trazê-los de volta para a plataforma de depósito. Para fazer isso, a câmera é usada para aquisição de
imagens e processamento adicional. Ele usa um algoritmo para diferenciar os blocos de destino dos blocos indesejados por sua cor e fornece uma
estimativa de distância usando seu tamanho na imagem e também usando os sensores ultrassônicos, que podem fornecer uma medição mais precisa.
Uma vez obtidos esses dados, as hélices são operadas para mover o barco em direção à plataforma flutuante para obter os blocos. Uma vez lá, o
braço robótico é estendido e a garra é fechada para agarrar um dos blocos. Por fim, o barco pode ir para a plataforma de depósito para entregá-lo.