Um veículo que já participou do IEEE Open e agora é usado para fins de exibição.
A poluição das praias é um problema enfrentado por muitos países do mundo e o Brasil não é uma exceção a esta lista. Esse
problema específico foi o tema principal do desafio OPEN de 2013. A competição exigiu que a equipe construísse um robô capaz
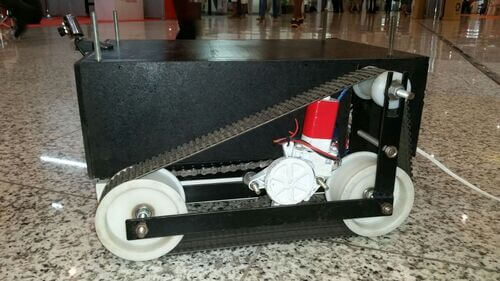
de reconhecer e coletar vários objetos de uma praia como um terreno. Por isso, desenvolvemos o robô, um robô feito com placas
de MDF ligadas a um “máquina de corrida” do motor do carro, que pode fornecer a capacidade de percorrer diferentes tipos de solo.
Motor de pára-brisa foi usado e seus rolamentos foram feitos de nylon e usinagem pela equipe.
O veículo rastreado participou do IEEE OPEN no LARC (Latin America Robotics Competition) em 2013. O objetivo do concurso era
desenvolver um robô limpador de praia. Consistia em uma arena de areia na qual eram distribuídas latas de refrigerante, que
deveriam ser coletadas pelo robô e levadas para o depósito de lixo. Havia também outros objetos - um manequim de tamanho real,
uma cadeira de praia e um guarda-sol - inseridos na arena como obstáculos.
Desenvolvemos um robô feito com placas de MDF presas a uma pista contínua, que pode fornecer a capacidade de percorrer
diferentes tipos de solo. Foram utilizados motores de limpeza de pára-brisa e seus rolamentos foram feitos de nylon e
usinados pela equipe.
Os motores são alimentados por uma bateria de 12 V e acionados por um par de pontes H de potência muito robustas,
fabricadas pelos membros da equipe. Também é equipado com um módulo de controle de rádio para ser usado em testes e
apresentações.
No que diz respeito à navegação, foi criado um algoritmo de visão computacional para detectar as latas, o depósito de lixo
e os obstáculos de cor e tamanho com um sensor Kinect. Com suas coordenadas, o veículo poderia se mover pela arena e
encontrar as latas, a fim de coletá-las e realocá-las.
Atualmente, não é mais usado em competições e geralmente é exposto em eventos e apresentações. Nessas situações, é
executado um algoritmo para fazer o robô seguir uma pequena esfera, para fins ilustrativos e explicativos.
No que diz respeito à navegação, foi criado um algoritmo de visão computacional para detectar as latas, o depósito de lixo
e os obstáculos de cor e tamanho com um sensor Kinect. Com suas coordenadas, o veículo poderia se mover pela arena e
encontrar as latas, a fim de coletá-las e realocá-las.
Atualmente, não é mais usado em competições e geralmente é exposto em eventos e apresentações. Nessas situações, é
executado um algoritmo para fazer o robô seguir uma pequena esfera, para fins ilustrativos e explicativos.